 手機直線:
手機直線: 咨詢熱線:0571-56211150
咨詢熱線:0571-56211150







木材裝載機是以裝卸原木為主,兼備一般裝載機功能的工程機械,為適應其工作介質多樣和工作條件惡劣的特點,動臂采用自重輕,側向剛度好和扭轉剛度大的箱型結構。但由于某些動臂的臂型設計和焊接工藝不夠合理,再加上隨機變化的沖擊載荷長期作用,于是在動臂后部腹板內側靠近上蓋板的高應力區出現低周疲勞裂紋,以致直接影響裝載機的使用壽命。為了提高動臂工作的可靠性,因此對動臂的強度分析和研究十分重要。首先我們針對原有動臂采用有限元分析,光彈性試驗和樣機實測等進行強度分析,根據動臂應力分布規律和大小進行多次改進,然后對改進的新動臂再進行強度分析,并驗證3種方法所得結果的一致性。其次針對箱型動臂空間對稱結構采用處理平面問題的簡單方法進行應力分析,同時用實測方法預以檢驗和修正。實踐證明:這種簡化是合理的,計算精度在工程上是足夠的。
按照木材裝載機的實際工作情況,確定下列外載荷和3種分析工況。鏟斗斗底與地面夾角為3-50,這時裝載機有兩種工作情況,見圖。鏟掘工況工況鏟斗沿水平面插入料堆同時舉升動臂,鏟尖中央作用著傾翻載荷,插入力PZ和鏟斗自重。傾翻工況輪離地,在鏟尖中央作用只和遠伸工況;高舉工況上述工況載荷數值見表。鏟斗沿水平面插入料堆后,動臂舉升,這時裝載機兩只后動臂水平至最遠位置,鏟斗滿載,動臂受力作用。動臂舉升到最高位置,動臂受P作用;偏載工況鏟斗水平,鏟尖離地10m,傾翻力作用點偏移至距鏟斗左端0.3L(L為斗寬)處,裝載機前橋墊起,舉升動臂;當偏載力達到極限值時,右后輪離地。動載試驗工況裝載機滿載,動臂水平,以高速和中速越過路障,前左輪連續通過兩根枕木,測定動臂的動應力和動荷系數。超負荷鏟掘試驗工況用鏟斗以高速插入生鐵塊和碎鐵塊進行鏟掘作業,測定動竹的動應力。
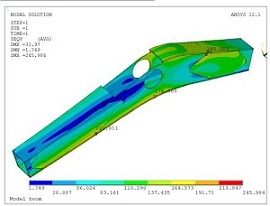
動臂按平面問題分析,將結構離散為計算模型時作下述處理:將兩側腹板合并成一塊平面板,并離散成三角形單元,單元厚度可以隨腹板和加強板的厚度變化而改變。上、下蓋板、腹板間加強筋和軸套離散成桿單元,桿截面隨蓋板或筋板的截面而改變。桿單元設置在兩相鄰節點之間,它與三角形單元的一個邊重合,三角形單元與桿單元用節點聯系在一起,它們的節點位移是協調的。這種混合單元的計算模型比較符合箱型結構的實際受力情況。由有限元理論,采用位移法以矩陣形式列出三角形單元和桿單元的節點力與節點位移之間的關系式。三角形單元應力矩陣,彈性模量,桿單元長度。根據上述有限元計算過程編制了平面加筋源程序,采用ALGOL60語言,通過電算,獲得新動臂在工況的應力和變形值。在以上諸工況中以L工況的動臂周邊應力為最大,動臂最大拉應力在其上緣前端,其值為最大壓應力在其下緣中部,兩個圓弧的交界處,其值為1166kg/cm2,新動臂安全系數為2.54,它與文獻推薦的強度安全系數2.0-2.5相比,強度完全滿足要求,從以上諸工況的動臂變形值也可以看出,工況的節點位移為最大。
箱型動臂光彈性試驗,采用聚碳酸醋為模型材料,它的光力學靈敏度高(比環氧樹脂減出份倍),無時間邊緣效應,無毒。為了直接觀察在外載荷作用下整個模型的全視場的稱色級圖案,我們采用有機玻璃和聚碳酸醋模型組合的加載裝置。將油缸,連桿,鏟斗用有機玻璃作為假想件,然后按工況條件和外載荷根據相似條件直接加載,由于有機玻璃透明性好,光力學效應靈敏度非常遲鈍,在兩者材料條紋值相差甚大的條件下長所規察到的等色線圖案沒有畸變現象。采用矩形截面的模型來模擬截面為箱型結構的動臂,下面給出模型應力轉化到動臂上原型應力的換算公式。
專業從事機械產品設計│有限元分析│強度分析│結構優化│技術服務與解決方案
杭州那泰科技有限公司
本文出自杭州那泰科技有限公司m.yw15777.cn,轉載請注明出處和相關鏈接!